A14b – Plotting and interpreting graphs in real contexts to find approximate solutions to problems such as simple kinematic problems –
Por um escritor misterioso
Descrição

Mode I+III multiscale cohesive zone model with facet coarsening and overlap: Solutions and applications to facet orientation and toughening - ScienceDirect
Kinematic Equations and Kinematic Graphs
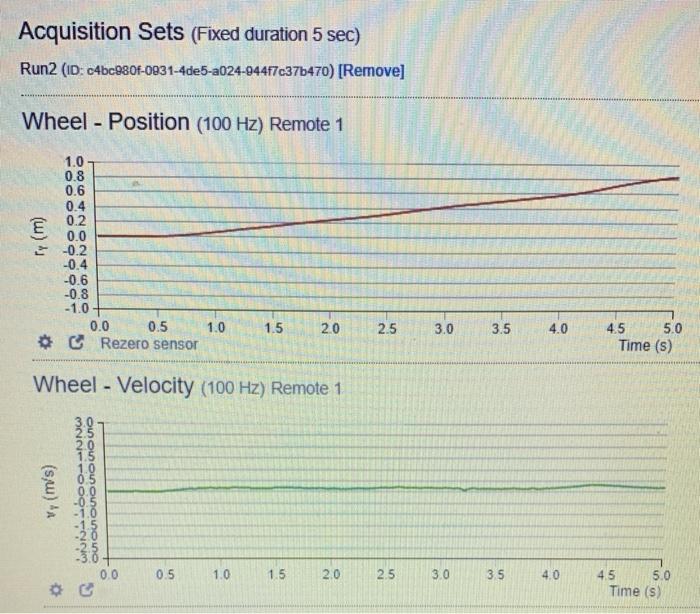
Solved Question 1-6: Use your graphs from Activity 1-1, and

ex1-1.htm

Lattice Boltzmann method–based efficient GPU simulator for vapor transport in the boundary layer over a moist soil: Development and experimental validation - ScienceDirect
CitationNetwork/TitleAbstract1.txt at master · AmartC/CitationNetwork · GitHub

Computation of Object Approach by a Wide-Field, Motion-Sensitive Neuron

BIOLOGY54321 - Interpreting Graphs Answer Key .htm - Interpreting Graphs Original Document: Interpreting Graphs 1. Mr. Ms class grades were graphed as a pie graph.

Dense Omnidirectional RGB‐D Mapping of Large‐scale Outdoor Environments for Real‐time Localization and Autonomous Navigation - Meilland - 2015 - Journal of Field Robotics - Wiley Online Library

Computation of Object Approach by a Wide-Field, Motion-Sensitive Neuron
de
por adulto (o preço varia de acordo com o tamanho do grupo)